Function description of visual dispensing system
作者:點膠機廠家 日期:2019-12-09 10:04 瀏覽:
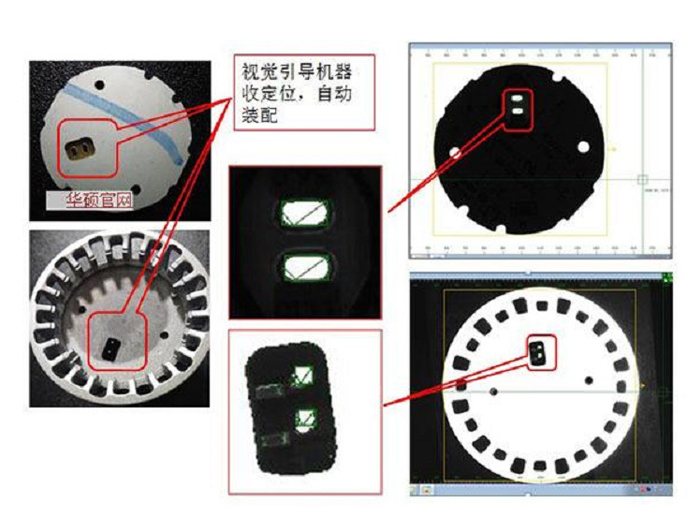
The sensor of the visual dispensing system can directly reflect the external information of the object, but a single camera can only obtain the two-dimensional image of the object. Although the three-dimensional vision can provide the three-dimensional information, it is difficult to identify the objects with the same shape and only different depth (such as the objects with holes, steps, etc.). And there are certain requirements for environmental light, which are not sensitive to light, object materials, simple structure, and can directly obtain the distance from the point to be measured to the sensor. Therefore, in the use of visual dispensing machine, the requirements for the working environment are very high, and the space position and posture of the end actuator of the manipulator are determined, so that it can accurately dispensing in the appropriate position.
System principle and structure
The visual dispensing system consists of manipulator, CCD, visual sensor and corresponding signal processing unit. CCD is installed on the actuator at the end of the manipulator to form hand eye vision. The two-dimensional image to be recognized and dispensing is acquired by CCD.
Floor mounted large-scale visual dispensing machine
Image processing mainly completes the accurate description of the object shape, including the following steps: image edge extraction, perimeter tracking.
Feature point extraction: curve segmentation and segment matching, graphic description and recognition. After extracting the edge of the object image, the visual dispensing system uses perimeter tracking to refine the edge, remove the pseudo edge points and noise points, code the edge points forming the closed curve, record the direction of each chain code and the X-Y coordinate value of each point on the curve, so as to further analyze the geometric characteristics of the object.
Visual dispensing control device
It has a good effect of noise reduction and smoothing. After the obtained object image is processed by the visual dispensing system, some features of the object can be extracted, such as centroid coordinates, area, curvature, edge, corner point and short axis direction of the object. According to these characteristic information, the basic description of the object shape can be obtained. On the basis of image processing, the computer infers the visual information, carries out image matching and recognition, and controls the manipulator to match the appropriate dispensing trajectory recommended by the visual dispensing system for dispensing.